
")
Rozwój systemów kierowania ogniem torpedowym dla Kriegsmarine
W wyniku ustaleń Traktatu Wersalskiego podpisanego w 1919 roku, Niemcy nie mogły posiadać okrętów podwodnych ani rozwijać broni torpedowej. Jednak już w lipcu 1922 roku w Holandii założono firmę Ingenieurskantoor voor Scheepsbouw, pod której przykrywką niemieccy konstruktorzy projektowali i budowali okręty podwodne dla innych państw, zdobywając cenne doświadczenie, wykorzystane później – w trakcie odbudowy U-Bootwaffe. Natomiast pod koniec roku 1919 dowództwo niemieckiej marynarki wojennej powołało Zakład Doświadczalny Torped w Eckernförde (Torpedoversuchsanstalt Eckernförde), mający oficjalnie zajmować się konserwacją i utrzymaniem torped, które pozostały w niemieckich arsenałach po zakończeniu Wielkiej Wojny. W rzeczywistości Zakład prowadził prace badawczo-rozwojowe, które doprowadziły - między innymi - do powstania niemieckiej torpedy parogazowej G7a oraz torpedy elektrycznej G7e.
Postanowienia Traktatu Wersalskiego ograniczyły niemiecką flotę wojenną do 6 pancerników typu Deutschland lub Lothringen, 6 lekkich krążowników, 12 kontr-torpedowców i 12 torpedowców. Na okrętach tych znajdowały się wyrzutnie torpedowe, a co za tym idzie – również przyrządy do kierowania ogniem torpedowym. Były to: BNZA 1 – Brücke Nacht Ziel Apparat 1 – trójkąt torpedowy umieszczony na pomoście bojowym wyposażony w otwarte przyrządy celownicze oraz RZA – Rohr Ziel Apparat 1 – celownik torpedowy umieszczony na stanowiskach wyrzutni obrotowych wyposażony w lunetę celowniczą. Przy pomocy BNZA 1 (na podstawie oszacowanych lub pochodzących z nakresu wartości prędkości oraz kąta biegu) wyznaczano kąt celowania torpedy, który przekazywano obsłudze wyrzutni torpedowych, która nastawiała otrzymany kąt na celowniku RZA oraz obracała wyrzutnie tak, aby cel znajdował się w pobliżu linii celowania. Następnie okręt rozpoczynał zwrot, a obsługa wyrzutni wystrzeliwała torpedy, gdy cel znalazł się w siatce celownika.
W połowie roku 1927, w TVA powołano specjalną komisję która miała zająć się rozwojem systemów kierowania ogniem torpedowym, jednak z powodu braku środków finansowych prace posuwały się bardzo wolno. W 1928 roku opracowano celownik BNZA 2, kolumnę namiernika TRW 28 (Torpedo-Richtungsweiser) oraz dysk torpedowy.
BNZA 2 to ulepszona wersja BNZA 1, w którym dodano możliwość wprowadzenia poprawki na prędkość kątową własnego okrętu w trakcie wykonywania zwrotu (niem. Winkelgechwindigkeit) oraz na opóźnienie wystrzelenia torpedy (niem. Befehlsverzug).
Kolumna namiernika TRW 28 była używana jako przyrząd celowniczy. Zlokalizowana była na pomoście bojowym okrętu (lub też dwie kolumny po obu stronach w przypadku większych okrętów). Wyposażona była w lunetę celowniczą. Można było na niej ustawić kąt rozproszenia salwy torpedowej, poprawkę na prędkość kątową własnego okrętu, poprawkę na opóźnienie wystrzelenia torpedy, kąt ustawienia wyrzutni torpedowej oraz kąt celowania torpedy, obliczony przy pomocy dysku torpedowego. Kolumna namiernika umożliwiała także przekazanie namiaru na cel do obsługi dysku torpedowego w celu wyznaczenia kąta celowania.
Dysk torpedowy miał średnicę około 0,5 metra i zlokalizowany był w pobliżu kolumny namiernika. W celu obliczenia kąta celowania (niem. Vorhaltwinkel) należało na nim ustawić prędkość celu oraz kąt biegu. Dodatkowo – należało na nim ustawić bieżący namiar na cel, dzięki czemu obsługa wyrzutni torpedowych mogła je obrócić odpowiednio względem linii celowania TRW. Po dokonaniu obliczeń oraz obróceniu wyrzutni torpedowych rozpoczynano zwrot okrętem, a obsługa wyrzutni torpedowych zwalniała torpedy na rozkaz oficera torpedowego obsługującego TRW. Długość biegu torpedy wyznaczano na podstawie tablic i porównywano z maksymalnym zasięgiem torpedy w celu sprawdzenia, czy cel znajduje się w zasięgu.
Strzelanie salwą odbywało się w następujący sposób – po odpaleniu pierwszej torpedy, oficer torpedowy naciskał dźwignię na kolumnie namiernika, która zwalniała sprężynę obracają lunetę celowniczą o nastawiony wcześniej kąt rozproszenia salwy torpedowej. Gdy w wyniku wykonywanego zwrotu cel znalazł się ponownie siatce celownika, wydawano rozkaz odpalenia kolejnej torpedy. Procedura była powtarzana była do momentu wystrzelenia całej salwy torpedowej.
W celu wyznaczenia parametrów ruchu celu stosowano nakres bojowy. W dedykowanym pomieszczeniu znajdował się stół nakresowy, a obok niego – zestaw odbiorników selsynowych przekazujących: kurs własny (z żyrokompasu), prędkość okrętu (z logu), odległość do celu (z dalmierza) oraz namiar na cel (z kolumny namiernika TRW lub celownika BNZA) oraz zegar. Obsługa stołu nakresowego wykorzystując otrzymywane informacje wykreślała kurs celu i na tej podstawie wyznaczała jego prędkość a także kąt biegu.
Rozpoczęto także prace nad rozwojem oraz wdrożeniem nowej metody prowadzenia ognia torpedowego zwanej Auswanderungsverfahren (ang. rate of change of bearing), wykorzystującej pomiar prędkości kątowej celu.
Jak już wcześniej wspominano, metoda Auswanderungsverfahren wywodziła się z metody Ausdampfverfahren. Ona z kolei opierała się na spostrzeżeniu, że w przypadku dwóch obiektów znajdujących się na kursie kolizyjnym (załóżmy, że jest to torpeda i cel), namiary na cel wzięte z torpedy są stałe.
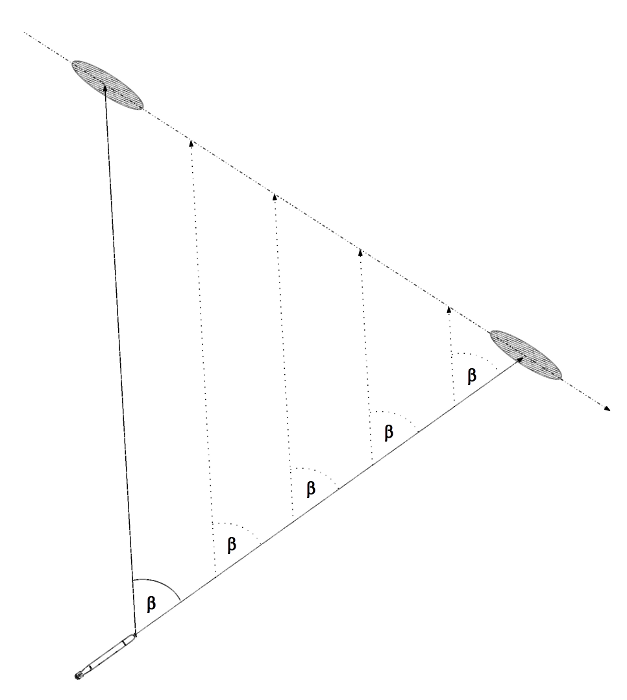
Rys. 1. Stałe namiary na cel w przypadku obiektów znajdujących się na kursie kolizyjnym
Metoda Ausdampfverfahren polegała na tym, że odpowiednio dobierając kurs i prędkość własnego okrętu, doprowadzano do tego, że namiar na cel ω pozostawał niezmienny (czyli okręt własny i cel znajdował się na kursie kolizyjnym). Oznacza to, że przesunięcia liniowe (czyli składowe przesunięcia prostopadłe do linii namiarów) okrętu własnego oraz celu są takie same.
BF = ED
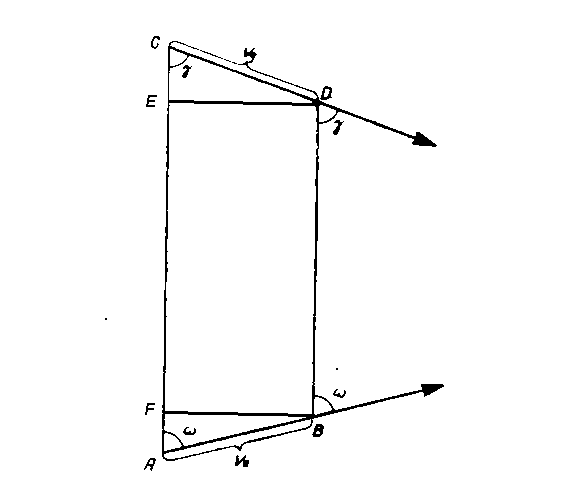
Rys. 2. Idea metody Ausdampfverfahren [1]
Zakładając znajomość prędkości własnej ve oraz prędkości celu vg a także namiaru ω i kąta biegu γ można zapisać:
\[\begin{aligned} \frac{BF}{v_e} = sin ω \text{ oraz } \frac{DE}{v_g} = sin γ \end{aligned} \]
czyli
\[\begin{aligned} BF = v_e * sin ω \text{ oraz } DE = v_g * sin γ \end{aligned} \]
Ponieważ przesunięcia liniowe są takie same:
\[\begin{aligned} v_e * sin ω = v_g * sin γ \end{aligned} \]
Jak pamiętamy, twierdzenie sinusów zastosowane do trójkąta torpedowego ma postać:
\[\begin{aligned} v_t * sin β = v_g * sin γ \end{aligned} \]
Przyrównując stronami dwa ostatnie równania otrzymujemy:
\[\begin{aligned} v_t * sin β = v_e * sin ω \end{aligned} \]
czyli
\[\begin{aligned} sin β = \frac{v_e}{v_t} * sin ω \end{aligned} \]
Jak widać, do wyznaczenia kąta strzału torpedowego β wymagane są (znane z dużą dokładnością) wartości: prędkości torpedy vt, prędkości własnej ve oraz namiaru na cel ω. Nie ma konieczności wykorzystania oszacowanych lub zmierzonych wartości prędkości celu vg oraz kąta biegu γ.
Na trójkącie torpedowym wystarczy nastawić prędkość własną jako prędkość celu oraz namiar na cel jako kąt biegu.
Zaletą metody Ausdampfverfahren jest korzystanie z wartości znanych z dużą dokładnością oraz brak konieczności wykonywania pomiaru odległości. Wadą natomiast jest długi czas (do kilkunastu minut) jaki jest potrzebny na wykonanie manewrów okrętem własnym w celu wejścia na kurs kolizyjny.
Rozwinięciem metody Ausdampfverfahren, które miało wyeliminować wspomnianą wadę była metoda Auswanderungsverfahren (a konkretnie wariant B tej metody). Polegała ona na wykonaniu dwóch pomiarów namiaru na cel w krótkim odstępie czasu oraz jednym pomiarze odległości (bez wykonywania dodatkowych manewrów własnym okrętem) i na ich podstawie (oraz znajomości prędkości własnego okrętu) obliczeniu liniowej prędkości celu (czyli składowej prędkości celu, która jest prostopadła do linii namiaru).
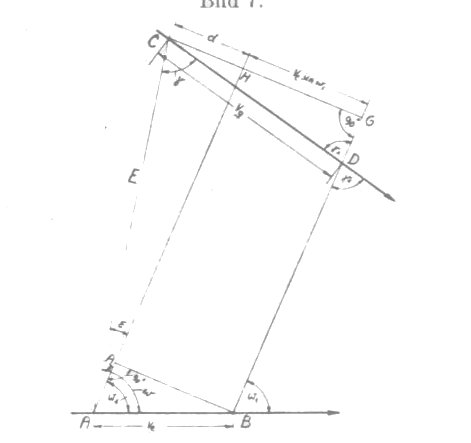
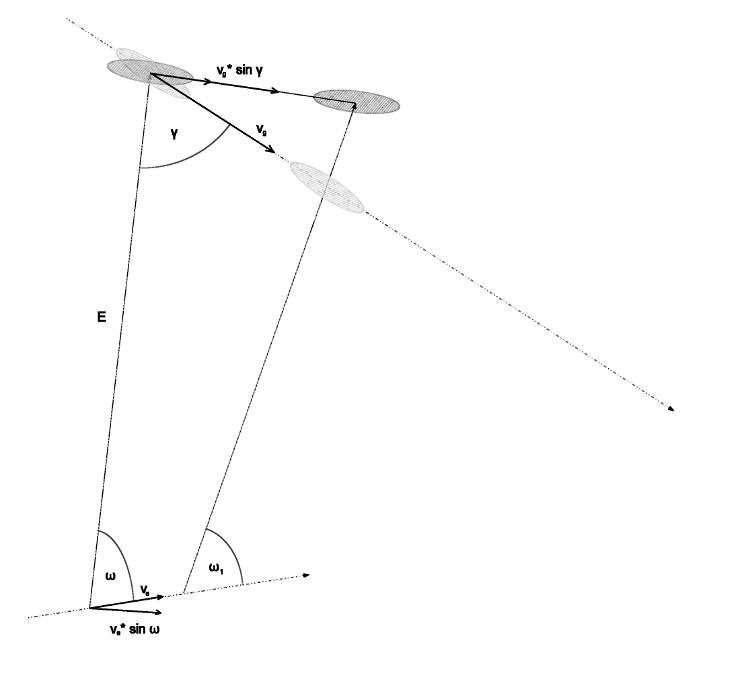
Rys. 3. Idea metody Auswanderungsverfahren [1]
Na rysunku przedstawiono okręt własny poruszający się kursem przechodzącym przez punkty A i B, oraz cel, poruszający się kursem przechodzącym przez punkty C i D. Namiar na cel w punkcie A wynosi ω, natomiast w punkcie B - ω1. Różnica namiarów: ω - ω1 = ε. Z punktu C poprowadziliśmy prostą prostopadłą do przedłużenia linii BD (odcinek CG), natomiast z punktu A prostą równoległą do prostej BD. Tworzymy także odcinek A1B, równoległy do odcinka CG. Liniowa prędkość celu jest równa:
\[\begin{aligned} CG = v_g * sin γ_1 \end{aligned} \]
Odcinek CG może być podzielony na dwie części: CH i GH.
CH = E * sin ε
\[\begin{aligned} GH = v_e * sin ω_1 \end{aligned} \]
Zatem:
\[\begin{aligned} CG = CH + GH = E * sin ε + v_e * sin ω_1 = v_g * sin γ_1 \end{aligned} \]
W zależności od tego, czy drugi namiar jest większy lub mniejszy od pierwszego, czynnik E * sin ε będzie dodawany lub odejmowany.
Twierdzenie sinusów zastosowane do trójkąta torpedowego ma postać:
\[\begin{aligned} v_t * sin β = v_g * sin γ_1 \end{aligned} \]
Przyrównując stronami dwa ostatnie równania otrzymujemy:
\[\begin{aligned} v_t * sin β = v_e * sin ω_1 ± E * sin ε \end{aligned} \]
czyli
\[\begin{aligned} sin β = \frac{v_e * sin ω_1 ± E * sin ε}{v_t} \end{aligned} \]
Przeprowadzenie strzelania metodą Auswanderungsverfahren odbywało się następująco: w pewnym momencie mierzono odległość do celu oraz brano pierwszy namiar na cel, a znając prędkość własną, przy pomocy dysku rachunkowego obliczano wartość ve * sin ω1. Po upływie minuty dokonywano drugiego pomiaru namiaru, obliczano różnice namiarów i korzystając ze zmierzonej wcześniej odległości obliczano wartość E * sin ε. Obliczone wartości są dodawane, a otrzymana suma jest ustawiana jako prędkość celu na trójkącie torpedowym. Kąt biegu jest ustawiany na 90°.
Z praktyki wiadomo było, że otrzymywano najlepsze rezultaty (nastawione na trójkącie torpedowym wartości najbliżej odpowiadały rzeczywistości), gdy wystrzelenie torped odbywało się od 10 do 15 sekund po drugim pomiarze namiaru. Po dłuższym czasie obliczone wartości coraz bardziej odbiegały od rzeczywistości. Użycie opisanej metody Auswanderungsverfahren ograniczone było jedynie do walki w szyku torowym. W przypadku walki w szyku kołowym występowała dużo większa zmiana namiaru na cel, a zatem człon E * sin ε był odpowiednio większy, co zwiększało błąd tej metody. Dlatego zmodyfikowano tę metodę tak, aby nadawała się również do wykorzystania w trakcie walki w szyku kołowym. Modyfikacja polegała na pomiarze prędkości zmiany namiaru na cel (lub też prędkości kątowej celu). Zmianę namiaru na cel w czasie można zapisać w postaci różniczki
\[\begin{aligned} \frac{dω_N}{dt} \end{aligned} \]
lub też w skrócie ωN.
Różniczka oznacza, że zmiana namiaru odbywa się w tak krótkim czasie, że drogę przebytą przez cel (odcinek AB) można przybliżyć długością łuku kąta (łuk AC) o jaki zmienił się namiar.
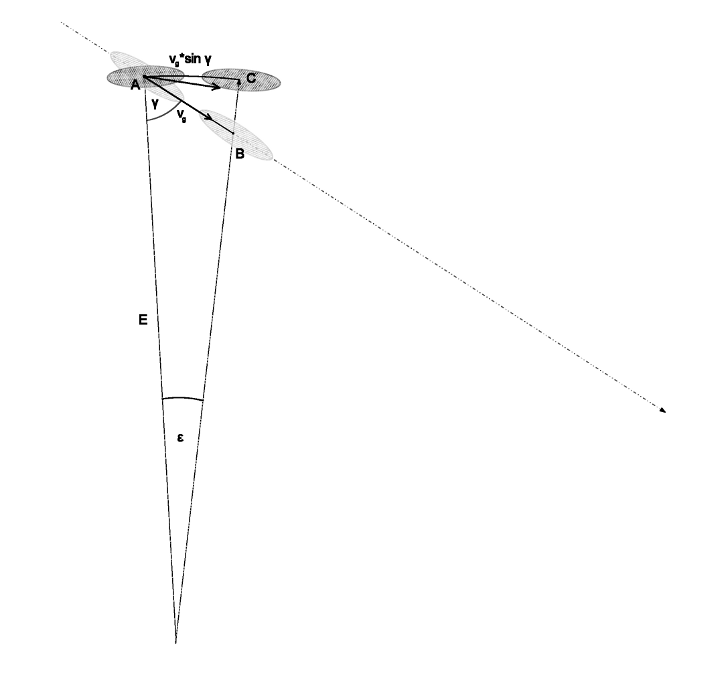
Rys. 4. Pochodna zmiany namiaru
Kąt ε w mierze łukowej ma wartość
\[\begin{aligned} ε = \frac{AC}{E} \end{aligned} \]
Zakładając, że okręt własny jest nieruchomy, prędkość kątowa wynosi:
\[\begin{aligned} \frac{ε}{dt} = \frac{AC}{E * dt} = ω_N \end{aligned} \]
Cel porusza się z prędkością vg z kątem biegu γ. Zatem składowa wektora prędkości prostopadła do linii namiaru ma wartość
\[\begin{aligned} v_g * sin γ = \frac{AC}{dt} \end{aligned} \]
Zatem
\[\begin{aligned} ω_N * E = v_g * sin γ \end{aligned} \]
Należy podkreślić, że powyższe zależności obowiązują jedynie w niewielkich przedziałach czasu, ponieważ zarówno prędkość kątowa jak i kąt biegu nie są wartościami stałymi, ale zależą od bieżącego namiaru.
Twierdzenie sinusów dla trójkąta torpedowego ma postać:
\[\begin{aligned} v_t * sin β = v_g * sin γ \end{aligned} \]
Porównując ostatnie dwa równania (przy założeniu zerowej prędkości okrętu własnego) otrzymujemy:
\[\begin{aligned} v_t * sin β = ω_N * E \end{aligned} \]
Iloczyn prędkości kątowej oraz odległości jest nastawiany na trójkącie torpedowym jako prędkość celu, natomiast kąt biegu jest ustawiany na 90°.
Powyższy wywód jest prawdziwy jedynie przy założeniu, że okręt własny znajduje się w bezruchu. Gdy okręt się porusza, wtedy na prędkość zmiany namiaru na cel - oprócz samego ruchu celu - składa się także ruch okrętu własnego.
Rys. 5. Namiar na cel przy niezerowej prędkości okrętu własnego
W tym wypadku pomiar szybkości zmiany namiaru na cel zmierzy wartość "względną", która jest sumą (lub różnicą) składowych wektorów prędkości okrętu własnego oraz celu prostopadłych do linii namiaru. Zatem otrzymamy:
\[\begin{aligned} ω_N * E = v_g * sin γ ± v_e * sin ω \end{aligned} \]
czyli po podstawieniu do twierdzenia sinusów z trójkąta torpedowego:
\[\begin{aligned} v_t * sin β = ω_N * E ± v_e * sin ω \end{aligned} \]
czyli:
\[\begin{aligned} sin β = \frac{ω_N * E ± v_e * sin ω}{v_t} \end{aligned} \]
Oznacza to, że do obliczenia kąta strzału torpedy konieczna jest znajomość pięciu wielkości, z których cztery (ωN, ve,ω, vt) znane są dokładnie, natomiast piątą - odległość E można w miarę łatwo zmierzyć (lub w ostateczności oszacować). Zadanie wyliczenia kąta strzału torpedy z racji dosyć skomplikowanych obliczeń miało spocząć na mechanicznym kalkulatorze, którego opracowanie zlecono kilku niemieckim firmom na początku lat 30tych XX wieku.
Jednym z poważniejszych problemów był dokładny pomiar prędkości kątowej celu. Przy odległościach rzędu kilku kilometrów oraz prędkości względnej rzędu kilkudziesięciu węzłów (przy założeniu przeciwnych, równoległych kursów) prędkość kątowa celu wynosi kilkanaście stopni na minutę, ale już przy kursach zgodnych, zmiany namiaru wynoszą jedynie kilka stopni na minutę. Prosty pomiar polegający na odczycie dwóch namiarów w określonym odstępie czasu przy tak niewielkiej różnicy byłby bardzo niedokładny. Dlatego firmy Zeiss oraz Kreiselgeräte GmbH otrzymały zlecenie skonstruowania urządzenia umożliwiającego dokładny pomiar prędkości kątowej celu.
W międzyczasie w TVA rozpoczęto prace nad kalkulatorem umożliwiającym obliczenie kąta rozproszenia salwy torpedowej oraz opóźnienia wystrzelenia torpedy – do tej pory odpowiednie wartości wyznaczane były z tablic.
Od początku roku 1929 we wszystkich urządzeniach celowniczych, zamiast lunet zaczęto stosować lornety. W TVA rozpoczęto na własną rękę prace nad system do pomiaru prędkości kątowej celu. W odróżnieniu od urządzenia opracowywanego przez Kreiselgeräte GmbH, które do pomiaru wykorzystywało sygnały pochodzące z głównego żyrokompasu okrętu, TVA postanowiło tak przerobić żyroskop pochodzący z torpedy G7v, aby pełnił funkcję żyroskopu prędkościowego (niem. Wendekreisel, ang. rate gyro). W żyroskopie prędkościowym wielkość precesji jest proporcjonalna do prędkości kątowej z jaką obracany jest żyroskop. Poprzez pomiar wartości precesji można określić prędkość kątową.
W 1930 roku okazało się, że ani Zeiss, ani Kreiselgeräte GmbH, ani TVA nie zdołały opracować systemu wykorzystującego pomiar prędkości zmiany namiaru celu. Dowództwo niemieckiej Reichsmarine poleciło firmie Zeiss kontynuować prace, jednak tym razem miały być one wspierane przez doświadczenia zebrane przez Kreiselgeräte GmbH oraz TVA.
W 1930 roku powstała także centrala kierowania ogniem torpedowym (niem. Torpedo-Rechenstelle) dla zamówionych właśnie krążowników ciężkich typu Deutschland (Deutschland/Lützow, Admiral Scheer i Admiral Graf Spee). Centrala zawierała następujące instrumenty: dysk torpedowy, opracowany przez TVA kalkulator kąta rozproszenia salwy torpedowej oraz kalkulator poprawki na opóźnienie wystrzelenia torpedy, ploter oraz system łącz selsynowych przekazujących obliczony kąt strzału torpedowego do wyrzutni.
Wprowadzone do użytku plotery (niem. Koppelanlage, Koppelgerät) ułatwiały prowadzenie nakresów bojowych oraz wyznaczanie na ich podstawie parametrów kursu celu. Były to plotery półautomatyczne (niem. halbautomatische Koppelanlage), które na podstawie informacji otrzymywanych z logu oraz żyrokompasu obliczały długość drogi przebytej w kierunku północ-południe oraz w kierunku wschód-zachód. Liczniki wyświetlające przebytą drogę znajdowały się w pobliżu stołu nakresowego, na którym obsługa plotera w równych odstępach czasu (30 sekund lub 1 minuta) zaznaczała kolejne położenia okrętu. Ponadto, w pobliżu stołu nakresowego znajdowały się odbiorniki łącz selsynowych, którymi przekazywano namiar na cel oraz odległość do niego. Na podstawie tych informacji, na tym samym nakresie zaznaczano położenie celu.
Ponieważ stosowana dotąd metoda strzelania salwy torpedowej polegająca na wykonywaniu przez okręt zwrotu oraz obracaniu celownika o obliczony kąt była bardzo niedokładna, TVA rozpoczęło prace nad modyfikacją żyroskopów torped G7v, tak aby umożliwiały zwrot torpedy o wprowadzony wcześniej kąt.
Kolumna namiernika TRW 28 została zintegrowana z dyskiem torpedowym i otrzymała oznaczenie TRW 30.
W roku 1931 w dalszym ciągu nie udało się opracować urządzenia do pomiaru prędkości kątowej celu. Do grona firm prowadzących prace nad tym systemem został dołączony Anschütz. Opracowywane urządzenie otrzymało nazwę TAm (niem. Torpedo-Auswanderungsmesser). W zależności od firmy, która pracowała nad daną wersją, otrzymało odpowiednie oznaczenie:
- Anschütz - TAm 3
- Goerz - TAm 4
- TVA - TAm 5
W tym samym roku Zeiss opracował automatyczny ploter (niem. vollautomatische Koppelanlage, Torpedo-Gefechtsschreiber) który na podstawie informacji otrzymywanych z logu, żyrokompasu, dalmierza oraz namiernika samoczynnie kreśli pozycję własnego okrętu oraz celu, a także obliczał kurs celu oraz składowe prędkości celu w kierunkach północ-południe oraz wschód-zachód.
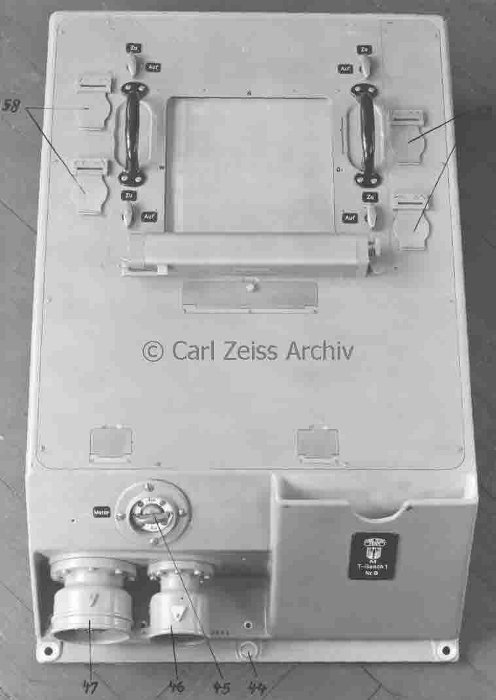
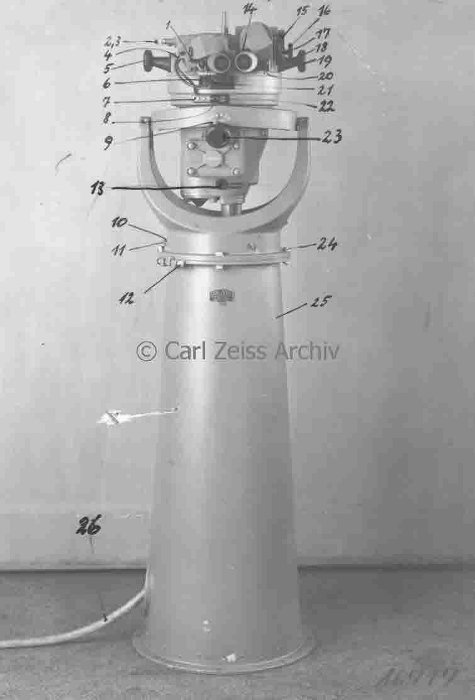
Fot. 1. Automatyczny ploter Zeissa [2]
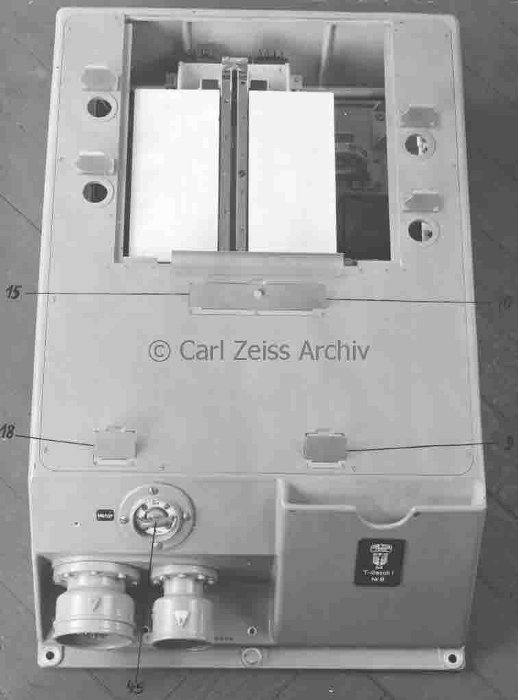
Fot. 2. Automatyczny ploter Zeissa [2]
Fot. 3. Celownik torpedowy BNZA wyposażony w lornetę o powiększeniu 8x60 [2]
Fot. 4. Celownik torpedowy BNZA wyposażony w lornetę o powiększeniu 8x60 [2]
Fot. 5. Celownik torpedowy RZA wyposażony w lornetę o powiększeniu 7x50 [2]
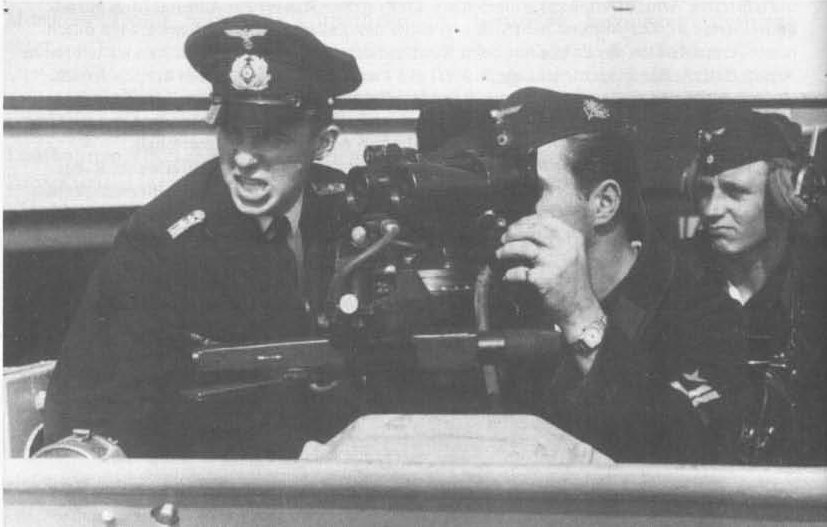
Fot. 6. Obsługa celownika torpedowego na pokładzie niemieckiego okrętu [3]
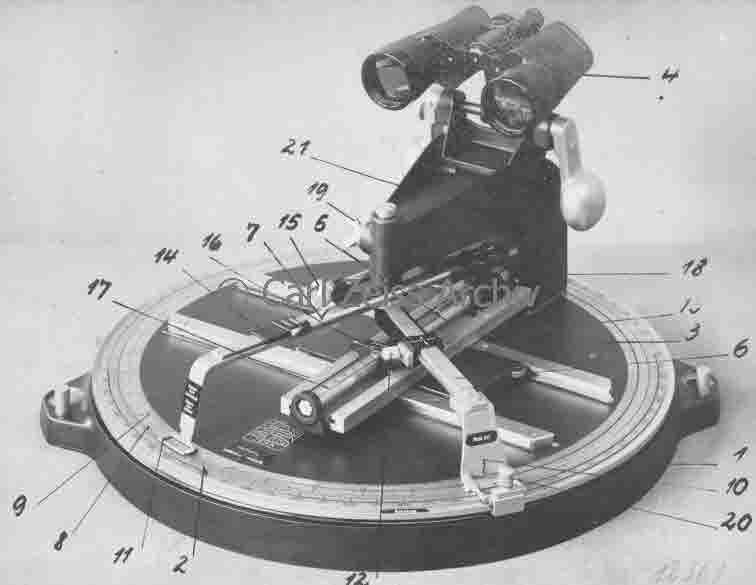
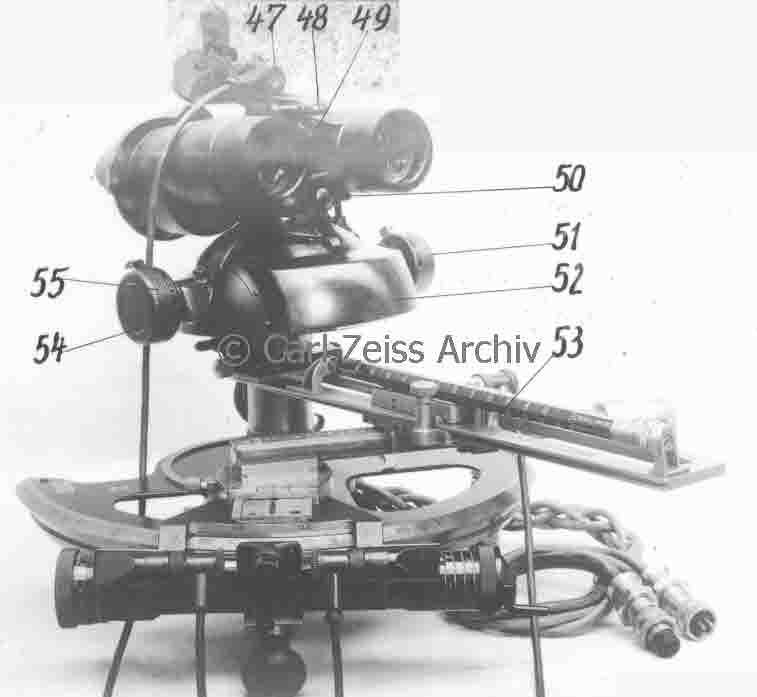
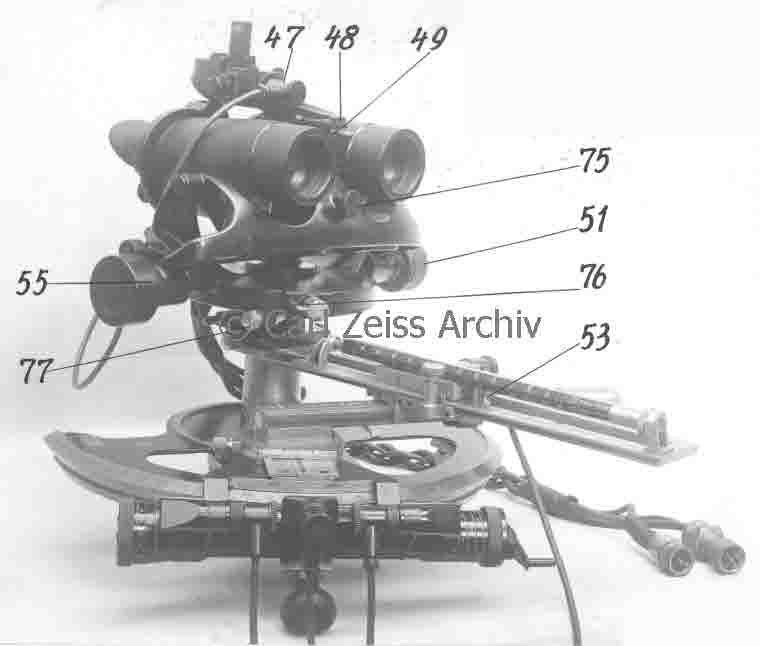
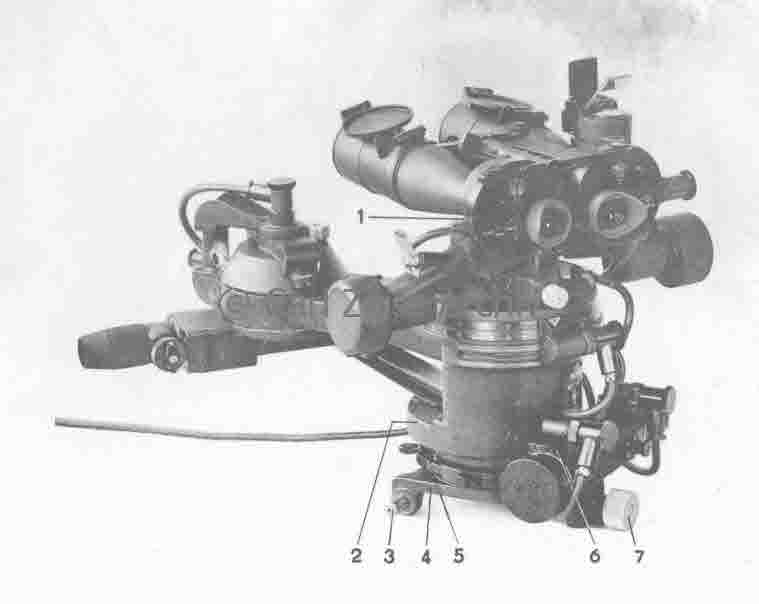
Fot. 7. Dysk torpedowy wyposażony w lornetę o powiększeniu 7x50 [2]
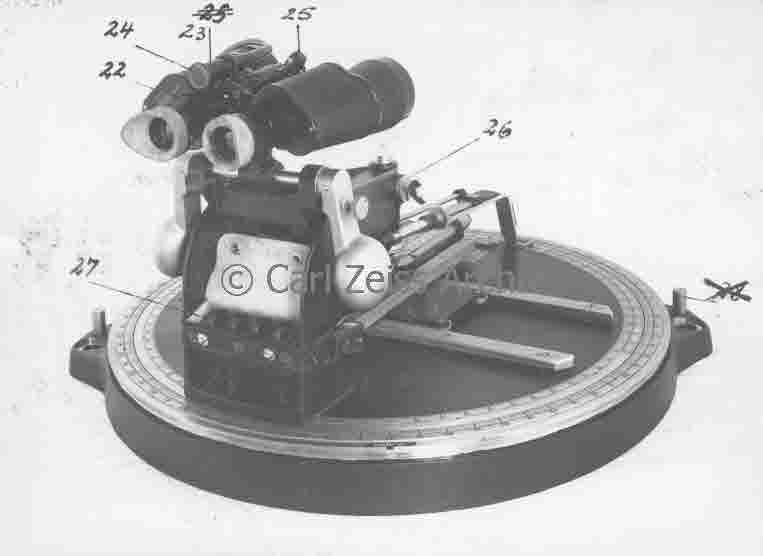
Fot. 8. Dysk torpedowy wyposażony w lornetę o powiększeniu 7x50 [2]
Ponieważ w TVA nie odnotowano znaczących sukcesów w pracach nad żyroskopami torpedowymi umożliwiającymi wykonywanie zwrotu po strzale, opracowano żyroskopowe urządzenie do strzelania salwy torpedowej (niem. Fächergerät). Jego działanie było następujące – po wprowadzeniu kąta rozproszenia salwy torpedowej, okręt rozpoczynał wykonywanie zwrotu a oficer torpedowy odpalał pierwszą torpedę. Kolejne torpedy były odpalane automatycznie w wyniku zamykania obwodu elektrycznego przez – nieruchomy względem powierzchni Ziemi – żyroskop.
Ostatecznie tylko TAm 5 okazał się być na tyle dopracowany, że rozpoczęto jego produkcję i instalację na okrętach. Urządzenia firm Anschütz i Kreiselgeräte GmbH zostały zarzucone.
Fot. 9. Torpedo-Auswanderungsmesser produkcji Zeissa [2]

Fot. 10. Torpedo-Auswanderungsmesser produkcji Zeissa [2]
W 1933 roku przyjęto do służby krążownik ciężki Deutschland (przemianowany później na Lützow). Wyposażony został w wspomniany wcześniej system kierowania ogniem torpedowym składający się z następujących elementów:
- urządzenia celownicze: cztery kolumny TRW 30 na skrzydłach pomostu bojowego, dwa celowniki BNZA 3 umieszczone na przednim pomoście bojowym, jedna kolumna TAm 5 umieszczona na górnym pomoście bojowym;
- dalmierze: dwa 3-metrowe dalmierze umieszczone na skrzydłach pomostu bojowego
W znajdującej się pod pokładem centrali kierowania ogniem torpedowym umieszczono: dysk torpedowy, kalkulator poprawek paralaksy, kalkulator rozproszenia salwy torpedowej, ploter automatyczny wykreślający kurs przeciwnika na podstawie odległości otrzymywanej z dalmierzy, namiaru celu otrzymywanego z TRW oraz własnej prędkości i kursu (otrzymywanego z logu i żyrokompasu), ploter automatyczny wykreślający szybkość zmiany odległości oraz namiaru celu na podstawie danych otrzymywanych z dalmierzy, TAm 5 oraz logu i żyrokompasu, a także łącze selsynowe do przekazywania obliczonego kąta strzału torpedowego do wyrzutni.
Wyrzutnie torpedowe były wyposażone w celowniki RZA 4.
W kolumnach TRW 30 po zintegrowaniu dysku torpedowego umożliwiono wprowadzanie poprawek paralaksy, prędkości kątowej zwrotu okrętu, opóźnienia wystrzelenia torpedy. Ponieważ w rzeczywistości był to wciąż model z roku 1928 rozbudowywany o kolejne funkcje na zasadzie modernizacji - stał się zbyt skomplikowany i złożony. Dlatego firma Siemens otrzymała zlecenie opracowania nowego urządzenia (o oznaczeniu TRW 34) które miało zawierać wszystkie dotychczasowe funkcje. Urządzenie zostało ukończone w roku 1935, dodatkowo posiadało funkcję mierzenia prędkości kątowej celu (podobnie jak kolumny Tam, jednak w odróżnieniu od nich nie wykorzystywano do tego żyroskopu prędkościowego, ale silnik elektryczny o nastawialnej prędkości obrotowej, który obracał lornetą celownika – obsługa kolumny TRW starała się tak dobrać prędkość silnika, aby cel utrzymywał się w siatce celowniczej).
W 1934 roku TVA rozpoczął prace nad kolejną wersją urządzenia TAm 6. Okazało się, że kolumna TAm 6 dokonuje tak dokładnych pomiarów prędkości, że stosowany wraz z nią dysk torpedowy wprowadza do obliczeń zbyt duży błąd. Dlatego Siemens opracował elektromechaniczny kalkulator torpedowy (niem. Torpedo Schuss Rechner 1 – T. Schu. Re. S. 1.), który w połączeniu z kolumną TAm 6 obliczał kąt biegu celu, prędkość celu, kąt strzału, poprawkę paralaksy oraz maksymalną odległość strzału.
Ponieważ Siemens nie miał wystarczających mocy produkcyjnych aby wyprodukować zamówioną ilość kalkulatorów torpedowych, zamówienie na te urządzenia złożono także w firmie Zeiss – otrzymały one oznaczenie T. Schu. Re. Z. 1.
W roku 1933 wprowadzono do służby nowe torpedy parogazowe typu G7a. Niecałe trzy lata później – na początku roku 1936 - zakończono rozpoczęte w 1930 roku prace umożliwiające nastawienie kąta odchylenia żyroskopowego torpedy, dzięki czemu możliwe stało się między innymi strzelanie salwą poprzez nastawienie indywidualnego kąta na każdej z torped, zamiast poprzez wykonywanie zwrotu przez okręt.
W połowie roku 1935 wcielono do służby pierwsze okręty podwodne odradzającej się U-Bootwaffe. Był to okręty typu IIA – niewielkie okręty o wyporności około 250 ton, wyposażone w trzy dziobowe wyrzutnie torpedowe. Niedługo później – w roku 1936 - do służby weszły dwa okręty typu I – okręty o wyporności około 800 ton, uzbrojone w cztery dziobowe i dwie rufowe wyrzutnie torpedowe. W początkowym okresie służby torpedy nie miały możliwości wykonywania zwrotu o ustawiony wcześniej kąt odchylenia żyroskopowego, dlatego zachodziła konieczność celowania całym okrętem. Do obliczania kąta strzału torpedy używano tablic oraz dysku torpedowego, natomiast celowano przy użyciu peryskopu (w przypadku ataku w zanurzeniu) lub też kolumny celowniczej TUZA 1 (niem. Torpedo-U-Boot-Zielapparat). Kolumna celownicza TUZA 1 umożliwiała jedynie przekazywanie namiaru wskazywanego celu do centrali za pomocą cięgna Bowdena. Atak przy użyciu takiego zestawu przyrządów wyglądał w następujący sposób: najpierw określano parametry kursu celu (z prowadzonego nakresu lub też szacując). Podoficer torpedowy znajdujący się w centrali odczytywał namiary na cel z mechanicznego odbiornika (w przypadku używania kolumny celowniczej) lub też bezpośrednio z podziałki peryskopu (w przypadku ataku w zanurzeniu) i na podstawie tej informacji oraz znajomości kursu celu oraz kursu własnego obliczał kąt biegu celu. Następnie przy użyciu tablic lub dysku torpedowego obliczany był kąt strzału torpedy który był przekazywany na pomost – do oficera torpedowego obsługującego kolumnę celowniczą lub też do dowódcy przy peryskopie. Po nastawieniu na kolumnie celowniczej lub peryskopie kąta strzału, manewrowano okrętem tak, aby cel znalazł się w siatce celownika lub peryskopu. Wówczas przekazywano rozkaz wystrzelenia torpedy do przedziału torpedowego, gdzie podoficer torpedowy obsługujący wyrzutnie ręcznie zwalniał mechanizmy spustowe. Wystrzelenie salwy torpedowej odbywało się poprzez zwalnianie kolejnych torped podczas wykonywania przez okręt zwrotu. Oczywistą wadą takiego systemu było opóźnienie pomiędzy przekazaniem namiaru na cel do centrali a otrzymaniem kąta strzału torpedowego – zwłaszcza w przypadku korzystania z kolumny celowniczej. Dlatego firma Zeiss otrzymała zlecenie opracowania nowej kolumny celowniczej, która – oprócz przekazania namiaru do centrali – umożliwiałaby obliczenie kąta strzału torpedowego. Opracowane urządzenie nosiło nazwę TUZA 2 i było w swej formie podobne do celownika BNZA używanego w okrętach nawodnych. Konstrukcja tego celownika była oparta o trójkąt torpedowy, który – oprócz obliczenia kąta strzału torpedowego – umożliwiał obliczenie zasięgu strzału torpedy oraz wprowadzenie poprawki na prędkość zwrotu okrętu. Poważną wadą tego celownika (podobnie zresztą jak w przypadku TUZA 1) była konieczność demontażu urządzenia przed zanurzeniem okrętu – dlatego Zeiss opracował kolejną wersję – TUZA 3 – która była odporna na działanie ciśnienia wody do głębokości około 100 metrów.

Fot. 11. TUZA 2 - celownik zintegrowany z trójkątem torpedowym [2]
W roku 1936 do służby weszły także pierwsze okręty typu VII. Jak wspomniano wcześniej, w tym roku rozwiązano także problem odchylenia żyroskopowego torped. O ile w przypadku okrętów nawodnych – wyposażonych (za wyjątkiem ścigaczy torpedowych) w obrotowe wyrzutnie torpedowe – odchylenie żyroskopowe było wykorzystywane głównie do dokładnego strzelania salwą torpedową (bez konieczności wykonywania zwrotu okrętem), to w przypadku okrętów podwodnych wyposażonych głównie w wyrzutnie stałe, odchylenie żyroskopowe zwiększało elastyczność ataku, zwalniając z konieczności manewrowania (celowania) okrętem.
Aby w pełni wykorzystać możliwości jakie dawało odchylenie żyroskopowe torped, należało opracować system umożliwiający:
- szybkie obliczenie kąta strzału torpedowego (uwzględniając paralaksę)
- szybkie dokonanie nastawy żyroskopu torpedy
- zdalne odpalenie torpedy przez dowódcę lub oficera torpedowego
W roku 1936, pod oznaczeniem Torpedovorhaltrechner C/36 firma Siemens opracowała kalkulator, który na podstawie wprowadzonych wartości: prędkości celu, odległości do celu, kąta biegu oraz namiaru na cel obliczał: maksymalny zasięg torpedy, kąt strzału torpedy, poprawkę paralaksy oraz kąt odchylenia żyroskopowego, który łączem selsynowym przekazywany był do przedziałów torpedowych. Kalkulator obliczał rozwiązanie tylko dla torped biegnących z prędkością 30 węzłów. Kąt rozproszenia salwy torpedowej obliczany był przez osobne urządzenie (Torpedo-Streuwinkel-Rechner) zaprojektowane przez TVA. Kalkulator C/36 trafił na pokłady 10 U-Bootów typu VIIA (U 27 - U 36).
W roku 1937 na pokłady 11 U-Bootów typu VIIB (U 45 - U 55) trafiła ulepszona wersja kalkulatora C/36. Do kalkulatora C/37 można już było wprowadzić prędkość torpedy.
W roku 1939 wprowadzono pod oznaczeniem T. Vh. Re. S2 kalkulatory firmy Siemens będące kolejną modyfikacją kalkulatorów C/36 i C/37. Ponadto, zamiast kolumn celowniczych TUZA 3 zaczęto instalować kolumny celownicze UZO 1 (U-Boot-Ziel-Optik) opracowane przez firmę Zeiss. Kolumny te nie miały wbudowanego trójkąta torpedowego, ale umożliwiały elektryczną transmisję namiaru do kalkulatora torpedowego przy użyciu łącza selsynowego. Jako celownik służyła lorneta Zeissa typu UDF 7x50. Podczas wymiany kolumn TUZA na UZO 1 na okrętach typu IX okazało się, że kolumna UZO 1 nie jest wystarczająco wysoka, aby wystawać ponad osłonę pomostu. Dlatego kolumnę tę montowano wraz z dodatkowym fundamentem – ta wersja otrzymała nazwę UZO 2. Ponieważ celowniki UZO 1 oraz UZO 2 nie były odporne na działanie wody oraz ciśnienia, musiały być demontowane przed każdym zanurzeniem okrętu. Uchwyty do zainstalowania celownika UZO były tak skonstruowane, że w razie potrzeby (awarii kalkulatora torpedowego) na kolumnie celowniczej można było zainstalować znajdujący się na pokładzie rezerwowy celownik TUZA 3.

Fot. 12. Kolumna celownicza UZO na pomoście U 995

Fot. 13. Górna część kolumny celowniczej UZO wraz z lornetą UDF 7x50 na pomoście U 86 [4]

Fot. 14. Górna część kolumny celowniczej UZO wraz z lornetą UDF 7x50 wyposażoną
w otwarte przyrządy celownicze służące do zgrubnego wycelowania lornety [2]
Obliczony przez kalkulator kąt odchylenia żyroskopowego był przekazywany przy pomocy łącza selsynowego do odbiorników znajdujących się w przedziałach torpedowych. Tam obsługa wyrzutni torpedowych ręcznie nastawiała kąty odchylenia żyroskopowego w torpedach, starając się zgrać położenia wskazówek urządzeń nastawczych torped z wskazówką odbiornika połączonego z kalkulatorem.
W roku 1940 opracowano system wykorzystujący łącza selsynowe oraz wzmacniacze maszynowe, który umożliwiał automatyczne nastawianie kąta odchylenia żyroskopowego torped – bez pośrednictwa człowieka. Ponadto skupiono się na ustandaryzowaniu elementów systemu kierowania ogniem torpedowym, tak aby poszczególne elementy mogły być zainstalowane na każdym typie U-Boota. Dzięki temu skracał się również czas potrzebny na przeszkolenie personelu w używaniu takiego jednolitego systemu.
Opracowano także kolejną wersję elektromechanicznego kalkulatora – T. Vh. Re. S3, która (w porównaniu z wersją S2) posiadała zintegrowany moduł umożliwiający obliczenie kąta rozproszenia salwy torpedowej oraz automatyczne (bez udziału operatora) przekazanie do torped kąta odchylenia żyroskopowego przy pomocy wspomnianego łącza selsynowego i wzmacniacza maszynowego. System został dodatkowo wyposażony w układ czasowy, który umożliwiał automatyczne odpalenie kolejnych torped w odstępie 2-3 sekund.
Kolejnym usprawnieniem była opracowana przez firmę Siemens odporna na działanie wody oraz ciśnienia dźwignia odpalania torped umieszczona na pomoście. Do tej pory przycisk odpalania torped znajdował się w centrali, który w przypadku odpalania z pomostu uruchamiany był przy pomocy cięgna Bowdena.
Kalkulator T. Vh. Re. S3 przeszedł pomyślnie testy przeprowadzone przez TVA i od połowy roku 1941 zaczął być instalowany na frontowych U-Bootach.
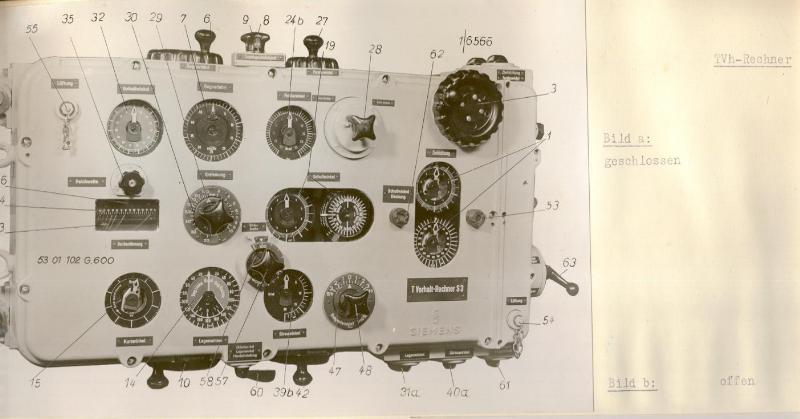
Fot. 15. Kalkulator torpedowy T. Vh. Re. S3
W wyniku przeprowadzonej standaryzacji elementów układu kierowania ogniem torpedowym, składał się on z: kalkulatora torpedowego T. Vh. Re. S3, odbiornika kąta odchylenia żyroskopowego przeznaczonego do wyrzutni dziobowych (umożliwiającego wprowadzenie kąta odchylenia żyroskopowego do torped znajdujących się w czterech wyrzutniach), odbiornika kąta odchylenia żyroskopowego przeznaczonego dla wyrzutni rufowych – w dwóch wariantach – dla wyrzutni pojedynczej okrętów typu VII oraz dwóch wyrzutni okrętów typu IX oraz XB.
W kolejnych latach niemieckie systemy kierowania ogniem torpedowym dla okrętów podwodnych nie podlegały dalszemu rozwojowi. W roku 1942 powstały pierwsze torpedy FAT oraz LUT a także rozpoczęto prace nad torpedami naprowadzanymi akustycznie. System kierowania ogniem torpedowym nie został w żaden sposób przystosowany do nowych możliwości torped. Jedyne zmiany to wyposażenie wyrzutni torpedowych w specjalne urządzenia nastawcze przeznaczone do wprowadzania nastaw FAT oraz LUT. Zamiast modyfikacji systemu kierowania ogniem torpedowym, opracowane zostały specjalne tablice z których można było odczytać niezbędne parametry nastaw FAT i LUT dla określonych parametrów ruchu celu.
W 1942 roku stwierdzono, że czterotorpedowa salwa niemieckich okrętów podwodnych jest niewystarczająca. Dlatego podjęto działania w kierunku jej zwiększenia. Jednym z rozwiązań było dodanie zewnętrznych wyrzutni torpedowych – odrzucono je ze względu na to, że wyrzutnie zewnętrzne były wrażliwe na uszkodzenia od eksplozji bomb głębinowych oraz lotniczych. Drugi rozwiązaniem było strzelanie salwy torpedowej z wszystkich wyrzutni jednocześnie – dziobowych i rufowych. To rozwiązanie również odrzucono, ponieważ wymagałoby opracowania nowego systemu kierowania ogniem torpedowym. Ostatecznie postanowiono poczekać na wprowadzenie nowych okrętów typu XXI, które wyposażone miały być w sześć dziobowych wyrzutni torpedowych.
Aby uniknąć opracowywania nowych elementów systemu kierowania ogniem torpedowym dla okrętów typu XXI, postanowiono wykorzystać istniejące już elementy. I tak zamiast opracowania nowego odbiornika kąta odchylenia żyroskopowego umożliwiającego wprowadzenie nastaw do torped spoczywających w sześciu wyrzutniach dziobowych, wykorzystano dwa istniejące już odbiorniki - jeden standardowy odbiornik przeznaczony dla czterech wyrzutni dziobowych oraz jeden standardowy odbiornik przeznaczony dla dwóch wyrzutni rufowych okrętów typu IX i XB.
W roku 1943 rozpoczęto prace nad doświadczalnymi okrętami z napędem Waltera (typ XVIIA i XVIIB). Z uwagi na deficyt energii elektrycznej na tych okrętach niemożliwa była instalacja systemów opartych o elektromechaniczny kalkulator T. Vh. Re. S3. Dlatego firma Steinheil opracowała całkowicie mechaniczny odpowiednik tego urządzenia, znany pod oznaczeniem T. Vh. Re. RGM 3.
Pod koniec 1943 roku, na Bałtyku prowadzono eksperymenty z wykorzystaniem radaru FuMO 61 Hohentwiel K (wersja przeznaczona dla niszczycieli, ścigaczy torpedowych oraz krążowników) do określania parametrów celu. W wyniku prób stwierdzono, że radar ten jest zbyt mało dokładny i może być tylko wykorzystany do wstępnej lokalizacji celu, natomiast dokładniejsze dane muszą być pozyskane wizualnie.
Po przechwyceniu przez Niemców brytyjskiego okrętu podwodnego HMS Seal w maju 1940 roku, specjalna komisja UAK przeprowadziła dokładne badanie techniczne zdobytego okrętu. Między innymi okazało się, że brytyjskie okręty podwodne były wyposażone w Asdic oraz ploter. Urządzenia te umożliwiały określenie parametrów kursu celu bez konieczności obserwacji peryskopowej. Sugerowano wówczas wyposażenie niemieckich U-Bootów w podobne urządzenia, jednak sugestie te zostały odrzucone. Jednym z powodów był brak wystarczającej ilości miejsca na okrętach typu VIIC (mimo, że typ VIIC był rozwinięciem typu VIIB z powiększoną centralą - właśnie w celu instalacji nowego sprzętu elektronicznego). Innym powodem był brak konieczności – w tamtym okresie – ataku bez użycia peryskopu – niemieccy dowódcy byli szkoleni w przeprowadzaniu nocnych ataków na powierzchni z bliskiej odległości. Przy okazji tej dyskusji po raz pierwszy pojawiła się kwestia wystrzeliwania torped z głębokości większej niż głębokość peryskopowa. Jednak i ona - podobnie jak kwestia użycia Asdicu – została zarzucona. Do obydwu konceptów powrócono przy okazji opracowywania taktyki użycia nowych okrętów typu XXI. Pierwsze okręty tego typu otrzymały istniejący system kierowania ogniem torpedowym, jednak dla kolejnych jednostek miał być opracowany system całkowicie automatyzujący strzelanie torped LUT (bez użycia dodatkowych tablic) na podstawie danych pochodzących z aktywnych i pasywnych urządzeń sonarowych (GHG i Nibelung) z głębokości większej niż głębokość peryskopowa. Z powodu zakończenia wojny do wprowadzenia tego systemu nie doszło.
Finalna wersja niemieckiego systemu kierowania ogniem torpedowym z kalkulatorem T. Vh. Re. S3 umożliwiała szybkie obliczanie kąta odchylenia żyroskopowego niezależnie od zmian kursu własnego okrętu. Dzięki temu umożliwiała elastyczny atak w trakcie bitew konwojowych – raz oszacowany i wprowadzony kąt biegu jednego celu wraz z aktualnym kursem własnym otrzymywanym z żyrokompasu oraz bieżącym namiarem na cel umożliwiał wyznaczenie kursu celu – który z reguły był taki sam dla wszystkich statków w konwoju. Po wystrzeleniu torped w kierunku jednego celu możliwa była zmiana celu – kalkulator szybko obliczał nowy kąt odchylenia żyroskopowego dla nowego namiaru – co umożliwiało szybkie wystrzelenie torped do kolejnego celu. Zmiany kursu w wyniku manewrów własnego okrętu były uwzględniane w obliczeniach. Miedzy innymi z tych właśnie powodów, w latach 1939-1942 bitwy konwojowe kończyły się znacznymi stratami statków alianckich. Przy czym należy zaznaczyć, że niemiecki kalkulator torpedowy wyliczał jedynie rozwiązanie trójkąta strzału torpedowego – czyli pełnił funkcję analogiczną do komponentu Angle Solver amerykańskiego kalkulatora TDC. Amerykańskie urządzenie składało się także z bloku zwanego Position Keeper, którego zadaniem było wyliczanie bieżącej pozycji celu na podstawie wprowadzonych danych (kursu celu oraz prędkości).
Źródła:
[1] Torpedoschießvorschrift, Heft 2, Ermittlung der Schußwerte, 1930
[2] Carl Zeiss Archiv
[3] Gerhard Koop, Siegfried Breyer, Die Deutsche Kriegsmarine, 1935-1945
[4] Jean-Philippe Dallies-Labourdette, U-Boote: Eine Bildchronik 1935-1945