
")
Stabilizowana linia azymutalna
W połowie lat 20-tych, w ofercie niektórych firm produkujących sprzęt optyczny (Zeiss, Nedinsco, Barr & Stroud, Kollmorgen) pojawiły się peryskopy wyposażone w komponent tzw. stabilizowanej linii azymutalnej (niem. Feste Linie im Raum, ang. Stabilized Azimuth Line). W polu widzenia peryskopu wyposażonego w taki układ widoczna była pionowa linia, której położenie w przestrzeni było stałe (stabilizowane przez repetytor żyrokompasu). Innymi słowy, pomimo zmian kursu okrętu podwodnego i związanych z tym przesunięć pola widzenia, pionowa linia azymutalna znajdowała się wciąż w tym samym miejscu (na tym samym namiarze rzeczywistym – względem północy geograficznej).
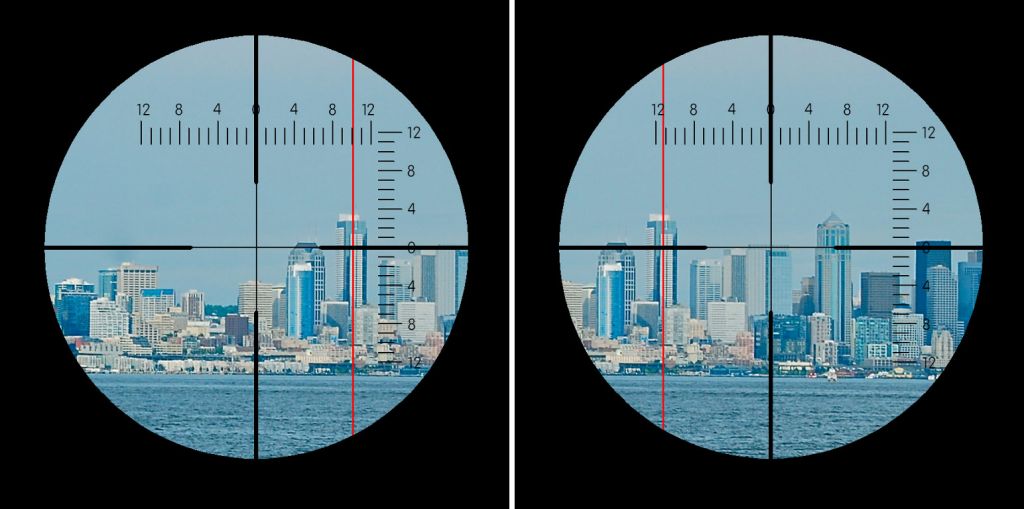
Rys. 1. Położenie stabilizowanej linii azymutalnej przed i po zmianie kursu okrętu o kilka stopni na sterburtę
Linia ta umożliwiała w miarę dokładny pomiar prędkości celu (przy znajomości jego długości), niezależnie od jego kursu (a właściwie kąta biegu). Pomiar ten polegał na pomiarze czasu, jaki upłynął od momentu, gdy dziób celu minął stabilizowaną linię azymutalna, do momentu, gdy tę linię minęła jego rufa. Prędkość celu (w m/s) otrzymywano dzieląc długość celu (w metrach) przez czas (w sekundach). Aby otrzymać (przybliżoną) prędkość w węzłach, wynik należało pomnożyć przez 2.
W celu przyspieszenia obliczeń, produkowane były logarytmiczne dyski rachunkowe, które umożliwiały natychmiastowe określenie wyniku dzielenia.
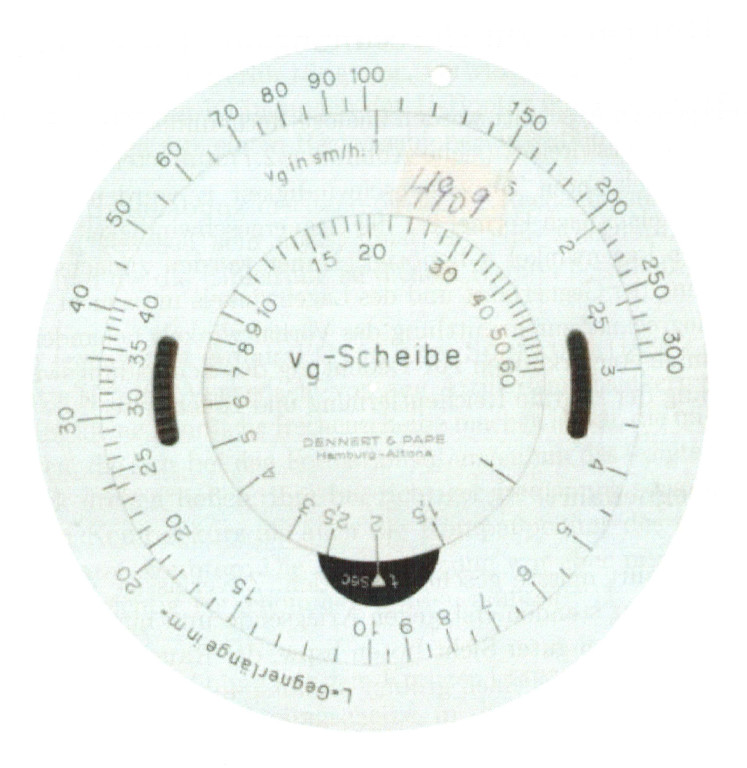
Rys. 2. Niemiecki logarytmiczny dysk rachunkowy (vg-Scheibe) produkowany przez firmę Dennert & Pape [1]
Co jest istotne, wynik pomiaru prędkości był niezależny od kąta biegu celu (nie zależał od położenia obserwatora względem celu).
Głównym ograniczeniem tej metody był wpływ ruchu własnego okrętu na wynik pomiaru. Najdokładniejszego pomiaru dokonywano, gdy okręt własny był nieruchomy. Gdy okręt własny się poruszał, na wynik pomiaru wpływała wartość prędkości własnej oraz namiar celu.
Prędkość własna najmniej wpływała na wynik pomiaru, gdy cel znajdował się na namiarze 0 lub 180°, a kursy celu i okrętu własnego były prostopadłe (tzn. składowa wektora prędkości własnej równoległa do wektora prędkości celu była równa 0), natomiast najbardziej, gdy cel znajdował się na trawersie, a kursy celu i okrętu własnego były równoległe (tzn. składowa wektora prędkości własnej równoległa do wektora prędkości celu jest największa – równa prędkości własnej). W owym skrajnym przypadku, gdy zarówno okręt podwodny jak i jego cel szły kursami równoległymi z tą samą prędkością, pomiar prędkości przy pomocy opisywanej metody dałby wynik równy zero.
Drugim ograniczeniem tej metody jest stosunkowo długi czas pomiaru, co wymaga odpowiednio długiej ekspozycji głowicy peryskopu nad powierzchnią wody (i zwiększa ryzyko jego spostrzeżenia). Przykładowo, w przypadku pomiaru prędkości krążownika ciężkiego Admiral Hipper (o długości 212 m), poruszającego się z prędkością marszową 19 węzłów, czas pomiaru wynosiłby minimum 23 sekundy.
Nie są autorowi znane żadne informacje, mówiące w jaki sposób komponent stabilizowanej linii azymutalnej był realizowany w niemieckich peryskopach Zeissa, ale na podstawie pochodzącej z 1940 roku instrukcji amerykańskiego peryskopu Type 2 (produkowanego przez firmę Kollmorgen, typ 89KA40/1.414) można przedstawić ogólną zasadę działania.
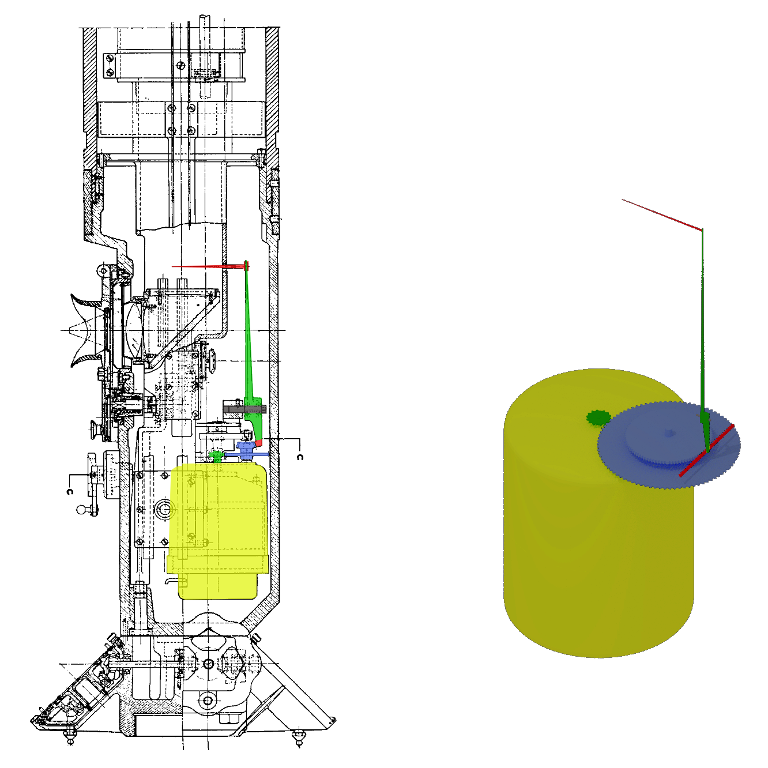
Rys. 3. Komponent stabilizowanej linii azymutalnej w amerykańskim peryskopie Type 2 firmy Kollmorgen [2]
W dolnej części skrzynki okularowej peryskopu znajdował się odbiornik selsynowy – powtarzacz żyrokompasu. Poprzez przekładnię zębatą, odbiornik ten przesuwał w jedną lub w drugą stronę listwę zębatą, znajdującą się na dolnym ramieniu dźwigni wskaźnikowej. Na końcu górnego ramienia dźwigni wskaźnikowej, znajdowała się wskazówka. Było ona widoczna w polu widzenia peryskopu właśnie jako stabilizowana linia azymutalna.
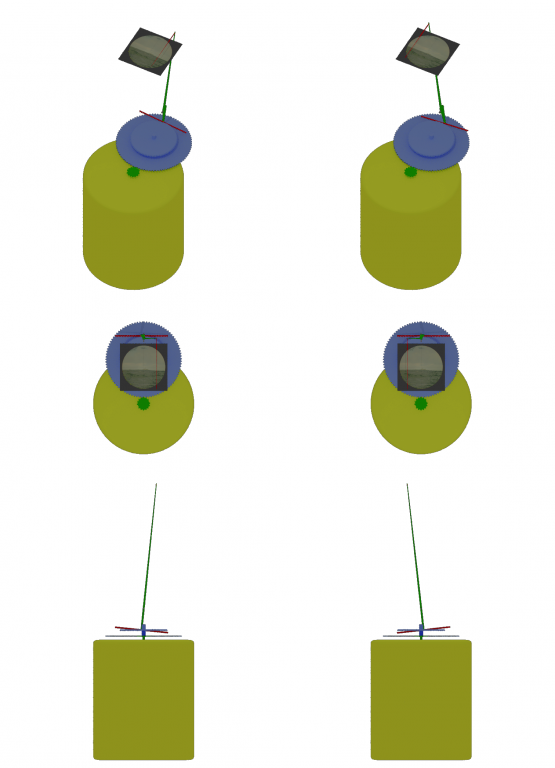
Rys. 4. Zasada działania komponentu stabilizowanej linii azymutalnej w amerykańskim peryskopie Type 2 firmy Kollmorgen
Oś powtarzacza żyrokompasu obracała się, gdy okręt podwodny zmieniał kurs. Obrót osi – poprzez przekładnię zębatą – przenoszony był na listwę zębatą, która z kolei zmieniała wychylenie dźwigni wskaźnikowej. Wraz ze zmianą wychylenia tej dźwigni, wskazówka (stabilizowana linia azymutalna) przesuwała się w polu widzenia peryskopu odpowiednio w lewo lub w prawo, tak aby niezależnie od zmian kursu okrętu pozostać w tym samym miejscu w przestrzeni.
Jeżeli chodzi o peryskopy Zeissa, w archiwum zachował się jedynie opis:
Die Feste Linie im Raum ist eine Zusatzeinrichtung in U-Boot-Sehrohren. Sie dient dazu, die Geschwindigkeit eines Gegnerschiffes aus seiner bekannten oder geschätzten Länge zu ermitteln. Im Gesichtsfeld des Sehrohres erscheint ein senkrechter Faden, der durch den Tochtermotor einer Kreiselkompaß-Mutteranlage raumfest gesteuert wird und daher von Kursänderungen und Kursschwankungen des U-Bootes unbeeinflußt ist, wenn am Sehrohr 6fache Vergrößerung eingestellt ist. Der Faden stellt also eine feste Richtung im Raum dar. Die Bewegung des senkrechten Fadens ist begrenzt und entspricht einem Gesichtswinkel von +/- 3 1/2°. Wird der Kurs des U-Bootes bei eingeschaltetem Tochtermotor um mehr als +/- 3 1/2° geändert, so läuft der Faden gegen einen Anschlag und bleibt seitlich im Gesichtsfeld stehen. Der Motor arbeitet über eine Rutschkupplung und läuft dabei ohne Schaden weiter. Mit einem Einstellhebel kann der senkrechte Faden in jede beliebige Lage innerhalb des Beeiches von +/- 3 1/2° gebracht werden. Nach Loslassen des Einstellhebels geht dieser selbsttätig in die Mittellage zurück und der senkrechte Faden erhält seine volle Bewegungsfreiheit wieder und wird vom Tochtermotor gesteuert. Die Bestimmung der Zielgeschwindigkeit wird wie folgt ermittelt: Mit einer Stoppuhr wird die Zeit gemessen, die ein Gegnerschiff von bekannter oder geschätzter Länge braucht, um die Feste Linie im Raum zu passieren. Aus dieser Stoppzeit lässt sich die Geschwindigkeit des Gegnerschiffes errechnen, wobei noch der eigene Kurs, die eigene Geschwindigkeit und der Kurs des Gegnerschiffes zu berücksichtigen sind.
Komponent stabilizowanej linii azymutalnej stanowi dodatkowe wyposażenie peryskopów okrętów podwodnych. Służy on do określenia prędkości celu na podstawie jego znanej lub szacowanej długości. W polu widzenia peryskopu (gdy używane jest 6-krotne powiększenie obrazu) widoczna jest pionowa linia, której położenie jest sterowane przez powtarzacz żyrokompasu, tak aby było ono stałe i niezależne od zmian kursu lub myszkowania okrętu podwodnego. Pionowa linia zachowuje niezmienne położenie w przestrzeni. Ruch pionowej linii możliwy jest w zakresie +/- 3 1/2°. Jeżeli kurs okrętu podwodnego (przy włączonym powtarzaczu żyrokompasu) zmieni się o więcej niż +/- 3 1/2°, ruch linii zostanie zatrzymany przez ogranicznik na granicy pola widzenia. Powtarzacz żyrokompasu jest połączony z mechanizmem sterującym położeniem pionowej linii przy pomocy sprzęgła ciernego, dlatego pomimo zablokowania ruchu linii, bez uszkodzeń może działać dalej. Przy pomocy dźwigni nastawczej, pionowa linia może zostać umiejscowiona w dowolnym położeniu w zakresie +/- 3 1/2°. Po zwolnieniu dźwigni nastawczej, położenie pionowej linii jest ponownie sterowane przez powtarzacz żyrokompasu. Określenie prędkości celu odbywa się w następujący sposób: przy pomocy stopera mierzony jest czas, w jakim cel o znanej lub szacowanej długości minie pionową linię. Na podstawie tego czasu można obliczyć prędkość celu, której wartość jest niezależna od kursu własnego, prędkości własnej oraz kursu celu.
Należy zwrócić uwagę, że linia azymutalna była stabilizowana jedynie względem zmian kursu okrętu, a nie względem obrotu peryskopu.
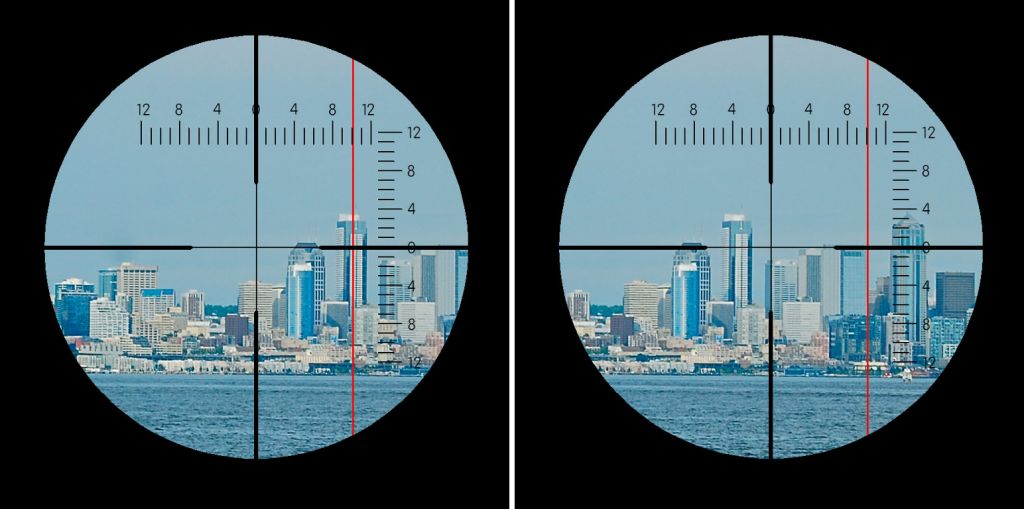
Rys. 5. Położenie stabilizowanej linii azymutalnej przed i po obróceniu peryskopu o kilka stopni w prawo
Innymi słowy, drobne zmiany kursu (wynikające z myszkowania okrętu lub niedokładności sternika), szczególnie mocno widoczne przy 6-krotnym powiększeniu obrazu, były kompensowane przez komponent stabilizowanej linii azymutalnej (nieskompensowane przesunięcie stabilizowanej linii o 1°, w przypadku celu znajdującego się w odległości 1000 metrów, dawało przesunięcie liniowe rzędu 17 metrów, co w przypadku wspomnianego wcześniej krążownika ciężkiego Admiral Hipper, skutkowałoby 8% błędem pomiaru prędkości). Kompensowane także były celowe zmiany kursu, o maksymalnej wartości do 32° (przy powiększeniu 1,5x) lub 8° (przy powiększeniu 6,0x).
Ponieważ cały mechanizm stabilizowanej linii azymutalnej znajdował się w skrzynce okularowej peryskopu, wraz z obrotem peryskopu przesuwała się stabilizowana linia azymutalna.
Przedstawione wcześniej dwa ograniczenia (zależność dokładności pomiaru od prędkości własnej oraz namiaru celu, a także długi czas ekspozycji głowicy peryskopu podczas pomiaru) spowodowały prawdopodobnie, że peryskopy z komponentem stabilizowanej linii azymutalnej nie były używane na niemieckich i amerykańskich okrętach podwodnych.
Istnieją natomiast przesłanki, że peryskopy Zeissa z wbudowanymi komponentami stabilizowanej linii azymutalnej miały zostać zainstalowane na nowych polskich okrętach podwodnych typu Orzeł zamówionych we Francji pod koniec roku 1938.
W przypadku niemieckich U-Bootów, echa metody Feste Linie im Raum widoczne są zarówno w regulaminach marynarki (Marine Dienstvorschriften) jak i elementach wyposażenia U-Bootów (a konkretnie w konstrukcji peryskopu bojowego StaS C/2).
I tak, w regulaminie Torpedo-Schießvorschrift, Heft II, Ermittlung der Schußwerte z roku 1930 (czyli jeszcze z okresu Reichsmarine, która nie posiadała wówczas żadnych okrętów podwodnych), w rozdziale opisującym metody pomiaru prędkości celu, znajduje się fragment:
Für das Schätzen der Gegnerfahrt gibt das Aussehen der Bug- und Hecksee, das Auswehen des Schornsteinrauchs (unter Berücksichtigung von Richtung und Stärke von Seegang und Wind), gegebenenfalls die Auswanderung gegen einen festen Punkt, die Auswanderung der Peilung (unter Berücksichtigung der eigenen Fortbewegung) Anhaltspunkte.
Do oszacowania prędkości celu można posłużyć się wyglądem fali dziobowej oraz kilwateru, odchyleniem dymu z kominów (biorąc pod uwagę kierunek, siłę wiatru oraz stan morza), ewentualnie można zmierzyć czas przejścia celu przez stały punkt lub też prędkość zmiany namiaru (z uwzględnieniem własnej prędkości).
W regulaminie Torpedo-Schießvorschrift, Heft 2, Schießverfahren z roku 1938 (czyli z okresu Kriegsmarine, która posiadała wówczas 45 okrętów podwodnych), w rozdziale opisującym metody pomiaru prędkości celu, znajduje się fragment:
Für das Schätzen der Gegnerfahrt gibt das Aussehen der Bug- und Hecksee, lediglich einen Anhalt, maßgebend darf nur die Auswanderung der Peilung unter Berücksichtigung der eigenen Fahrt, der Lage und Entfernung sen.
Ein gutes Hilfsmittel zur Kontrolle der Schätzung der Gegnerfahrt ist bei bekannter Gegnerlänge das Durchwandernlassen des Gegners durch einen festen Punkt, z.B. eine Landmarke oder durch einen rechtweisenden Peilstrahl. Unabhängig von Lage und Entfernung ist die Zeit, ein Schiff zum Durchlaufen eines im Raume festliegenden Peilstrahls gebraucht, ein Maß für seine Geschwindigkeit. Hierzu wird die Zeit vom Einlaufen des Bugs in den Visierfaden bis zum Verlassen des Hecks gemessen.
Es ist: vg = (Gegnerlänge in m) / (Zeit in sec) * 2 (sm/h)
Voraussetzung für die Bestimmung ist, daß der Angreifer gestoppt liegt oder den Gegner zu Beginn der Messung recht vorausnimmt und diesen Kurs durchhält. Die als Anlage 4 beigefügte Tabelle ermöglicht es, aus der abgestoppten Zeit, bei bekannter Länge des Gegners, die Gegnerfahrt zu bestimmen.
Beispiel: Ist die abgestoppte Zeit, die ein Schiff zum Durchlaufen der Peilung gebraucht, 15 sec und seine Länge 180 m,
so ist: vg =180 * 2 / 15 = 24 sm/h
Do oszacowania prędkości celu można posłużyć się wyglądem fali dziobowej oraz kilwateru, natomiast do miarodajnego określenia prędkości powinna zostać wykorzystana metoda pomiaru prędkości zmiany namiaru celu (z uwzględnieniem prędkości własnej, kąta biegu oraz odległości).
Dobrym sposobem na weryfikację oszacowania prędkości celu (przy znanej jego długości) jest pomiar czasu przejścia celu przez stały punkt, np. punkt terenowy na brzegu lub pionową linię podziałki peryskopu. Niezależnie od kąta biegu oraz odległości, czas w jakim cel minie stały punkt pozwala określić jego prędkość.
Otrzymujemy: vg = (długość celu w metrach) / (czas w sekundach) * 2 (węzły)
Wymagane jest, aby okręt własny się nie poruszał, lub też cel w momencie rozpoczęcia pomiaru znajdował się na namiarze 0. Załączona w Dodatku 4 tabela umożliwia określenie prędkości celu (o znanej długości) na podstawie zmierzonego czasu.
Przykład: cel o długości 180 metrów minął stały punkt w przestrzeni w czasie 15 sekund,
zatem: vg =180 * 2 / 15 = 24 węzły.
Z kolei regulamin M.Dv. 416 Torpedo-Schießvorschrift für U-Boote z 1943 roku zawiera tabelę Bestimmung der Gegnergeschwindigkeit aus bekannter Ziellänge und Zeit des Durchwanderns durch einen feststehenden Punkt bzw. feste Linie im Raum, która umożliwiała łatwe określenie prędkości celu (w węzłach) na podstawie jego długości oraz czasu przejścia przez stabilizowaną linię azymutalną.
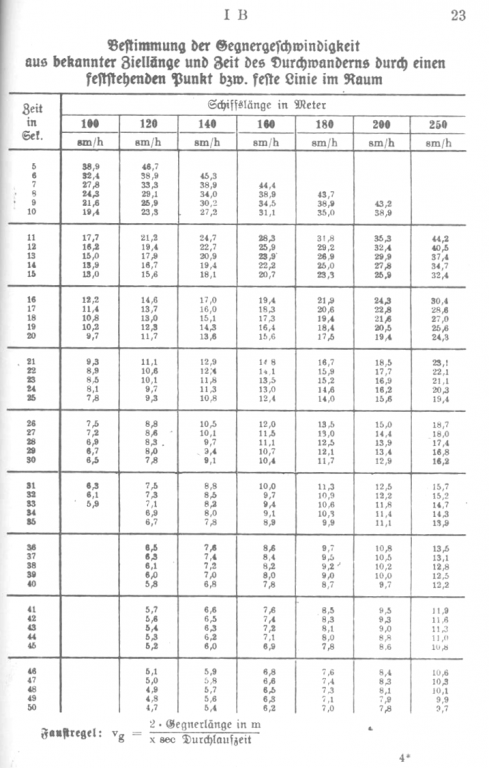
Rys. 6. Tabela umożliwiająca określenie prędkości celu na podstawie jego długości oraz czasu przejścia przez stabilizowaną linię azymutalną [3]
Peryskop bojowy StaS C/2 nie był wyposażony w komponent stabilizowanej linii azymutalnej sensu stricto, jednak posiadał on układ wskazujący namiar bezwzględny. Układ ten, wskazujący bieżący namiar bezwzględny (czyli względem północy) peryskopu z dokładnością do 20', można było wykorzystać analogicznie jak komponent stabilizowanej linii azymutalnej.

Fot. 1. Peryskop StaS C/2 z widocznym wskaźnikiem namiaru bezwzględnego [4]
Odbywało się to wówczas następująco: po ustawieniu peryskopu tak, aby jedna z pionowych linii siatki celowniczej znajdowała się przed dziobem celu, rozpoczynano pomiar czasu pomiędzy momentem, gdy dziób przeszedł przez tę linię a momentem gdy tę linię minęła rufa. Jednocześnie, druga osoba (nie była to osoba patrząca przez peryskop), obserwowała wskaźnik namiaru bezwzględnego i przy pomocy ręcznego pokrętła obrotu peryskopu utrzymywała tę samą wartość podczas zmian własnego kursu (drobnych, wynikających z myszkowania lub też wynikających z zamierzonej zmiany kursu).
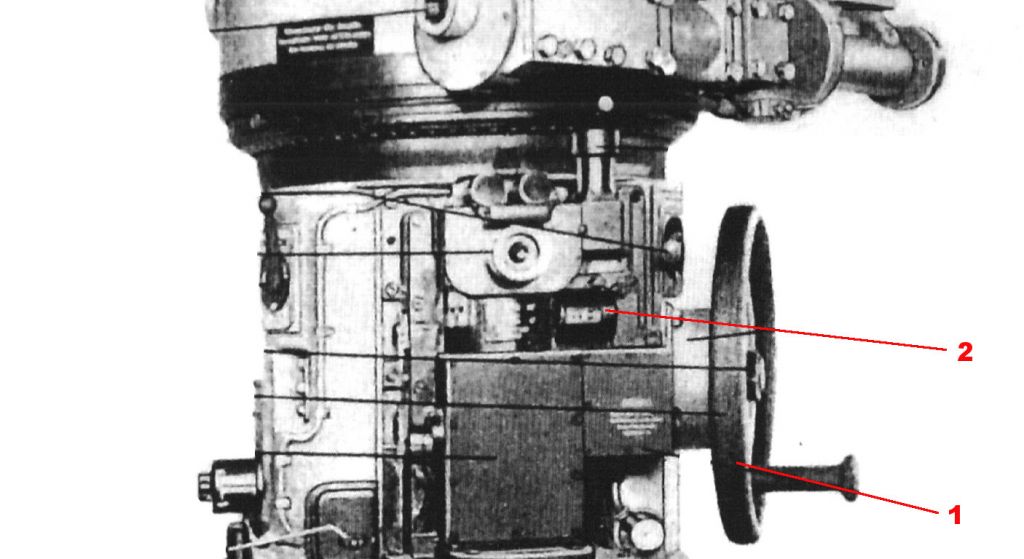
Fot. 2. Peryskop StaS C/2 z widocznym pokrętłem obrotu (1) oraz wskaźnikiem namiaru bezwzględnego (2) [5]
Źródła:
[1] Thomas Müller, Analogrechner auf deutschen U-Booten des Zweiten Weltkrieges
[2] Submarine Periscope Type 2, 1940
[3] Tabellenheft zur Torpedo-Schießvorschrift für U-Boote, 1940
[4] Photographs taken during inspection by U.S. Naval Officers - Enclosure C of ONI Report
[5] Fritz Köhl, Axel Niestle, Vom Original Zum Modell - U-Boot Typ VIIC